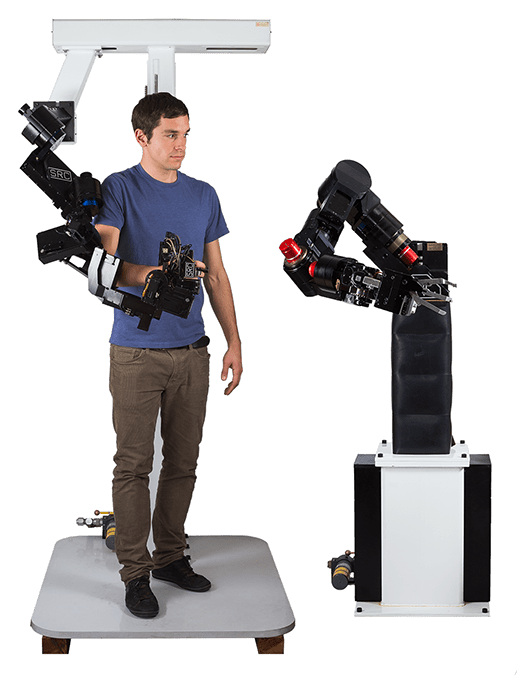
This robot was originally designed for telerobotics: imagine a human aboard the International Space Station operating the Master Arm and being able to remotely control the Slave Arm as it repairs a satellite.
Master/Slave Arm is used for psychophysics–the study of how the brain works in human motor control. A human will place an arm inside the Master Arm and reach for a moving object, and the Master Arm will apply some torque to interfere and see how the human corrects for this. This helps researchers create models on how humans use energy, speed and time in grasping and manipulation. Those lessons will be applied to the Slave Arm.